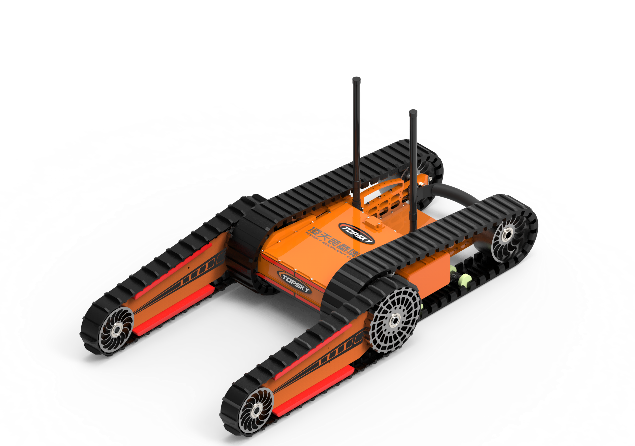
Roboti ndogo ya upelelezi wa moto ya RXR-C10D


| Roboti za upelelezi wa moto hutumika zaidi kuchukua nafasi ya mazingira yanayoweza kuwaka, kulipuka, tata na mengine magumu yanayokaribia kwa njia bandia kwa ajili ya upelelezi wa mazingira na kugundua gesi. Pia zinaweza kutumika upelelezi katika nafasi ndogo na za chini kama vile chini ya mwili wa gari na chini ya rafu. Chasi hutumia muundo wa mkono wa mbele wa kutambaa + wa mbele unaozunguka mara mbili, ambao unaweza kuvuka vikwazo vya wima vya 280mm kwa kiwango cha juu, na unaweza kupanda jukwaa la 360mm, ambalo linaweza kuzoea maeneo mbalimbali kwa ajili ya kupelekwa haraka kwa mapigano. Kiolesura cha upanuzi wa kazi nyingi kinaweza kuwa na moduli tofauti za kazi za mwili. Wakati huo huo, roboti ina vifaa vya kudhibiti waya, ambavyo vinaweza kufanya kazi kwa mbali kupitia waya chini ya hali ya kuingiliwa kwa ishara. Mikono miwili ya roboti inayozunguka inaweza kuvunjwa kwa uhuru, ambayo inaweza kutumika katika hali zaidi. |
| 2.Vipengele |
| 1. Kidhibiti cha mbali mahiri Kitufe cha upanuzi wa kazi nyingi Operesheni inayoonekana kwenye skrini kubwa 2. Urekebishaji wa mashine nzima Uundaji wa moduli ya chasisi, uundaji wa moduli ya betri, uundaji wa moduli ya kusimamishwa 3. Utendaji bora katika kupanda, kupanda ngazi, kuvuka vikwazo na kuvuka mitaro Inaweza kupanda miteremko ya digrii 45 Inaweza kupanda ngazi za digrii 40 Inaweza kupanda vikwazo vya wima vya sentimita 28 Inaweza kutanda mitaro yenye upana wa sentimita 41 4. Mfumo wa video Hali ya mawasiliano ya nukta 3, ili kutatua shughuli za kawaida katika mazingira yasiyoonekana, umbali wa mawasiliano ni kilomita 1 Kamera ya HD ya chaneli 2 5. Moduli nyingi za upanuzi Moduli ya Lidar, moduli ya kugundua gesi, moduli ya upelelezi wa gimbal, moduli ya mkono wa roboti
Milango minne ya plagi ya usafiri wa anga iliyopanuliwa, RS232, RS485, CAN, mlango wa mtandao, 24V, 12V (kawaida hufungwa)
|
| 3.Tvigezo vya kiufundi3.1 Roboti nzima: 1. Jina: Roboti ya upelelezi mdogo wa moto ya RXR-C10D (B) 2. Mfano: RXR-C10D 3. Kazi ya msingi: kazi ya upelelezi wa video 4. Kiwango cha ulinzi: kiwango cha ulinzi cha roboti nzima ni IP67 5. Nguvu: betri ya lithiamu ya umeme, ya ternari 6. Saizi: ≤urefu 610mm×upana 490mm×urefu 200mm (bila antena) 7. Kipenyo cha kugeuza: kuzungusha mahali pake 8. Uzito: ≤25kg 9. Kasi ya juu zaidi ya mstari: ≥2.7m/s, kasi isiyo na hatua ya udhibiti wa mbali 10. Kiasi cha kupotoka moja kwa moja: ≤5% 11. Uwezo wa kupanda: ≥45° 12. Uwezo wa kupanda: ≥40° 13. Urefu wa vikwazo vya kuvuka: ≥280mm 14. Muda wa kutembea mfululizo: ≥saa 2 15. Umbali wa udhibiti wa mbali usiotumia waya: mita 500 (wazi) 16. Umbali wa uwasilishaji wa video bila waya: Mawasiliano ya nukta mbili ya mita 500 (wazi); Mawasiliano ya nukta tatu ya mita 800 (wazi) ili kukidhi eneo la kuzibwa (hiari); 17. Umbali wa udhibiti wa mbali wa waya: 100m 18. Umbali wa upitishaji wa video wenye waya: mita 100 19. Kitambaa cha roboti: Kitambaa cha roboti kitatengenezwa kwa mpira unaozuia moto, unaopinga tuli na unaostahimili joto la juu, ukiwa na Kevlar ndani, na muundo wa ulinzi dhidi ya kukatika kwa reli.
3.2 Mtazamo wa video ya roboti: 1. Idadi na usanidi wa kamera: Kamera mbili zenye ubora wa juu kwenye mwili zinaweza kutazamwa na kudhibitiwa kwa wakati mmoja, na mazingira yanayozunguka eneo yanaweza kuwasilishwa kwa uthabiti kwa kidhibiti cha mbali, ambacho kinaweza kukidhi uendeshaji wa roboti bila waya na kuboresha sana ufanisi wa mapigano. 3.3 Vigezo vya usanidi wa kituo cha udhibiti wa mbali 1. Vipimo: 362*188*40 (Isipokuwa urefu wa roki) 2. Uzito wa mashine nzima: 2.5kg 3. Onyesho: skrini ya LCD yenye mwangaza wa juu isiyopungua inchi 10, njia 4 za kubadilisha mawimbi ya video 4. Mfumo wa kudhibiti: mfumo endeshi wa windows10 5. Muda wa kufanya kazi: saa 2 (inayoendelea) 6. Kazi za msingi: Kidhibiti cha mbali na kifuatiliaji vimeunganishwa na kubebeka, ambavyo vinaweza kutazamwa na kudhibitiwa kwa wakati mmoja, na mazingira yanayozunguka eneo yanaweza kuwasilishwa kwa mwendeshaji wa mbali kwa uthabiti. (Kazi ya hiari) Onyesho la wakati halisi la nguvu ya betri ya mwili wa gari na kisanduku cha kudhibiti mbali, umbali wa kutembea na taarifa nyingine, na linaweza kudhibiti mienendo ya mbele, nyuma, na usukani wa roboti. Njia ya uwasilishaji data ni uwasilishaji usiotumia waya kwa kutumia ishara iliyosimbwa kwa njia fiche 7. Kazi ya kurekodi na kucheza video: video inaweza kurekodiwa wakati wowote, na maudhui ya video yaliyorekodiwa yanaweza kuhifadhiwa kiotomatiki, na video inaweza kuchezwa moja kwa moja kwenye kituo cha kudhibiti mbali, au video inaweza kunakiliwa kwa vifaa vingine 8. Kipengele cha kudhibiti kutembea: Ndiyo, kijiti 1 cha kuchezea kinatambua uendeshaji unaonyumbulika wa roboti mbele, nyuma, kugeuka kushoto na kugeuka kulia 9. Swichi ya video: Ndiyo, swichi ya jog ya kujiweka upya 10. Kipengele cha kudhibiti mwangaza: Ndiyo, swichi ya kugeuza
4.4 Nyingine: Kijiko cha mawasiliano cha waya cha mita 100 Urefu: 100mm |
| 4.Usanidi wa bidhaa |
| 1. Roboti ya upelelezi mdogo wa moto ya RXR-C10D (B) seti 12. Kisanduku cha kudhibiti mbali (ikiwa ni pamoja na betri) seti 12 3. Chaja ya kudhibiti mbali (12.6V) kipande 1 4. Chaja ya mwili wa roboti (25.2V) vipande 1 1 5. Antena ya upitishaji picha ya 1.4GHz vipande 4 6. Mawasiliano ya waya mita 100 spool 1 pcs 7. Zana za usaidizi seti 1 |