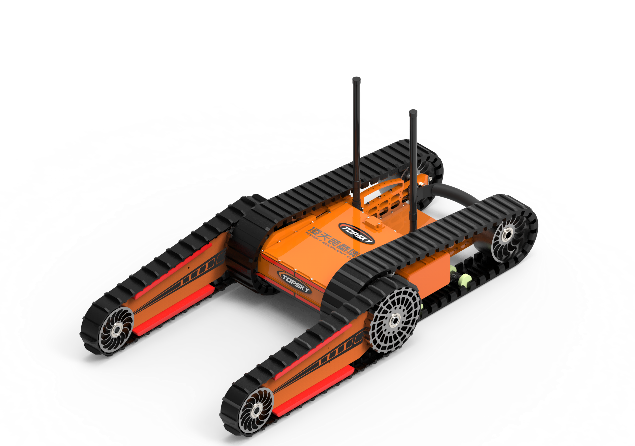
RXR-C10D Roboti ndogo ya uchunguzi wa moto


| Roboti za uchunguzi wa moto hutumiwa zaidi kuchukua nafasi ya mazingira ambayo yanakaribia kuwaka, ya kulipuka, magumu na mengine magumu kwa uchunguzi wa mazingira na ugunduzi wa gesi.Pia zinaweza kutumika kufanya upelelezi katika nafasi ndogo na za chini kama vile sehemu ya chini ya gari na sehemu ya chini ya rafu.Chasi hupitisha muundo wa mkono wa kubembea na wa kutambaa mbele, ambao unaweza kuvuka vikwazo vya wima vya mm 280 zaidi, na unaweza kupanda jukwaa la 360mm, ambalo linaweza kukabiliana na maeneo mbalimbali kwa ajili ya kusambaza vita haraka.Kiolesura cha upanuzi wa kazi nyingi kinaweza kuwa na moduli tofauti za kazi za mwili.Wakati huo huo, roboti ina vifaa vya udhibiti wa waya, ambayo inaweza kufanya kazi kwa mbali kupitia waya chini ya hali ya kuingiliwa kwa ishara.Mikono miwili ya roboti inayobembea inaweza kugawanywa kwa uhuru, ambayo inaweza kutumika katika matukio zaidi. |
| 2.Vipengele |
| 1. Smart remote control Kitufe cha upanuzi wa kazi nyingi Utendaji unaoonekana skrini kubwa 2. Modularization ya mashine nzima Urekebishaji wa chasi, urekebishaji wa betri, urekebishaji wa kusimamishwa 3. Utendaji bora katika kupanda, kupanda ngazi, kuvuka vikwazo na kuvuka mitaro Inaweza kupanda mteremko wa digrii 45 Inaweza kupanda ngazi 40 Inaweza kupanda vizuizi vya wima 28 cm Inaweza kuchukua mitaro ya upana wa 41 cm 4.Mfumo wa video Njia ya mawasiliano ya pointi 3, kutatua shughuli za kawaida katika mazingira yasiyo ya kuona, umbali wa mawasiliano 1km Kamera ya HD ya idhaa 2 5.Moduli nyingi za upanuzi Moduli ya Lidar, moduli ya kugundua gesi, moduli ya upelelezi ya gimbal, moduli ya mkono wa roboti
Milango minne ya plagi ya anga iliyopanuliwa, RS232, RS485, CAN iliyohifadhiwa, mlango wa mtandao, 24V, 12V (kawaida hufungwa)
|
| 3.Tvigezo vya kiufundi3.1 Roboti nzima: 1. Jina: Roboti ndogo ya utambuzi wa moto ya RXR-C10D (B) 2. Mfano: RXR-C10D 3. Kazi ya msingi: kazi ya upelelezi wa video 4. Kiwango cha ulinzi: kiwango cha ulinzi cha roboti nzima ni IP67 5. Nguvu: umeme, betri ya lithiamu ya ternary 6.Ukubwa: ≤urefu 610mm× upana 490mm× urefu 200mm (bila antena) 7. Kipenyo cha kugeuza: kuzunguka mahali 8.Uzito: ≤25kg 9. Upeo wa kasi ya mstari: ≥2.7m/s, udhibiti wa kijijini kasi isiyo na hatua 10. Kiasi cha kupotoka moja kwa moja: ≤5% 11.Uwezo wa kupanda: ≥45° 12. Uwezo wa kupanda: ≥40 ° 13. Urefu wa vikwazo vya kuvuka: ≥280mm 14.Muda unaoendelea wa kutembea: ≥2h 15. Umbali wa udhibiti wa mbali usio na waya: 500m (wazi) 16. Umbali wa maambukizi ya video bila waya: 500m (wazi) mawasiliano ya pointi mbili;800m (wazi) mawasiliano ya pointi tatu ili kukidhi eneo la kuziba (hiari); 17.Umbali wa udhibiti wa mbali wa waya: 100m 18.Umbali wa kusambaza video yenye waya: 100m 19. Kitambazaji cha roboti: Kitambaaji cha roboti kitatengenezwa kwa mpira unaozuia miali ya moto, mpira usiotulia na unaostahimili joto la juu, ukiwa na Kevlar ndani, pamoja na muundo wa kuzuia uharibifu.
3.2 Mtazamo wa video ya roboti: 1.Nambari na usanidi wa kamera: Kamera mbili za ubora wa juu kwenye mwili zinaweza kutazamwa na kudhibitiwa kwa wakati mmoja, na mazingira yanayozunguka eneo la tukio yanaweza kuwasilishwa kwa uthabiti kwa kidhibiti cha mbali, ambacho kinaweza kukidhi uendeshaji wa wireless wa robot na kuboresha sana ufanisi wa kupambana. 3.3 Vigezo vya usanidi wa terminal ya udhibiti wa mbali 1. Vipimo: 362*188*40 (Ukiondoa urefu wa roki) 2. Uzito wa mashine nzima: 2.5kg 3. Onyesho: skrini ya LCD yenye mwangaza wa juu isiyopungua inchi 10, chaneli 4 za ubadilishaji wa mawimbi ya video 4. Jukwaa la mfumo wa kudhibiti: mfumo wa uendeshaji wa windows10 5. Muda wa kufanya kazi: 2h (kuendelea) 6. Kazi za msingi: Udhibiti wa kijijini na kufuatilia ni kuunganishwa na kubebeka, ambayo inaweza kutazamwa na kudhibitiwa kwa wakati mmoja, na mazingira karibu na eneo yanaweza kuwasilishwa kwa utulivu kwa operator wa kijijini. (Utendaji wa hiari) Onyesho la wakati halisi la mwili wa gari na nguvu ya betri ya kisanduku cha udhibiti wa mbali, umbali wa kutembea na maelezo mengine, na inaweza kudhibiti harakati za roboti mbele, nyuma na uendeshaji.Mbinu ya utumaji data ni upitishaji wa pasiwaya kwa kutumia mawimbi yaliyosimbwa kwa njia fiche 7.Kurekodi kwa video na kazi ya kucheza: video inaweza kurekodi wakati wowote, na maudhui ya video yaliyorekodi yanaweza kuhifadhiwa moja kwa moja, na video inaweza kuchezwa moja kwa moja kwenye terminal ya udhibiti wa kijijini, au video inaweza kunakiliwa kwa vifaa vingine. 8. Kitendaji cha udhibiti wa kutembea: Ndiyo, kijiti 1 cha furaha kinatambua utendakazi rahisi wa roboti mbele, nyuma, upande wa kushoto na kugeuka kulia. 9. Swichi ya video: Ndiyo, weka upya kibadilishaji cha jog 10. Kazi ya udhibiti wa taa: Ndiyo, kubadili kubadili
4.4 Nyingine: Spool ya mawasiliano ya waya 100m Urefu: 100 mm |
| 4.Mpangilio wa bidhaa |
| 1. Roboti ndogo ya utambuzi wa moto ya RXR-C10D (B) 1 seti2.Sanduku la udhibiti wa mbali (pamoja na betri) seti 1 3. Chaja ya kudhibiti kijijini (12.6V) 1 pcs 4. Chaja ya mwili wa roboti (25.2V) 1 1 pcs 5. 1.4GHZ antenna ya maambukizi ya picha 4 pcs 6. Mawasiliano ya waya mita 100 spool 1 pcs 7. Vifaa vya msaidizi 1 seti |